
DU-BLE: различия между версиями
ERNEST (обсуждение | вклад) Нет описания правки |
ARSLAN (обсуждение | вклад) |
||
| (не показаны 32 промежуточные версии 3 участников) | |||
| Строка 1: | Строка 1: | ||
[[en:DU-BLE| English version]] | [[en:DU-BLE| English version]] | ||
[[es:DU-BLE| Versión en español]] | [[es:DU-BLE| Versión en español]] | ||
= <big>'''Определение и назначение датчика'''</big> = | = <big>'''Определение и назначение датчика'''</big> = | ||
[[Файл: | [[Файл:DU-BLE.png|мини|308x308пкс|Текущий дизайн DU-BLE]] | ||
Беспроводной датчик угла с автономным питанием '''DU-BLE''' торговой марки ЭСКОРТ (в дальнейшем – измеритель, изделие, датчик угла, DU-BLE) предназначен для измерения углового положения отклоняемых частей различных машин и механизмов относительно гравитационного поля Земли, определения направления вращения (в соответствующих режимах) и передачи этих данных по радиоканалу на частоте 2.4 ГГц. | Беспроводной датчик угла с автономным питанием '''DU-BLE''' торговой марки ЭСКОРТ (в дальнейшем – измеритель, изделие, датчик угла, DU-BLE) предназначен для измерения углового положения отклоняемых частей различных машин и механизмов относительно гравитационного поля Земли, определения направления вращения (в соответствующих режимах) и передачи этих данных по радиоканалу на частоте 2.4 ГГц. | ||
| Строка 15: | Строка 14: | ||
'''Серийный номер''' - код, состоящий из ряда букв или цифр, присваиваемый продукту (датчику). | '''Серийный номер''' - код, состоящий из ряда букв или цифр, присваиваемый продукту (датчику). | ||
'''Имя датчика''' - обозначение датчика среди BLE устройств, состоящее из первых двух букв модели датчика и 6 последних значений серийного номера; например, | '''Имя датчика''' - обозначение датчика среди BLE устройств, состоящее из первых двух букв модели датчика и 6 последних значений серийного номера; например, DU_100100; | ||
'''MAC-адрес''' - уникальный идентификатор, присваиваемый каждой единице активного оборудования. Используется для распознавания устройств в сети. | '''MAC-адрес''' - уникальный идентификатор, присваиваемый каждой единице активного оборудования. Используется для распознавания устройств в сети. | ||
| Строка 21: | Строка 20: | ||
'''Пакет данных''' - совокупность значений, передаваемых устройством, оснащенным Bluetooth передатчиком, структура которого задается протоколом передачи данных. | '''Пакет данных''' - совокупность значений, передаваемых устройством, оснащенным Bluetooth передатчиком, структура которого задается протоколом передачи данных. | ||
'''Протокол передачи данных''' - набор определённых правил или соглашений интерфейса логического уровня, который определяет обмен данными между различными программами или устройствами. В случае датчика | '''Протокол передачи данных''' - набор определённых правил или соглашений интерфейса логического уровня, который определяет обмен данными между различными программами или устройствами. В случае датчика DU-BLE для передачи пакетов данных используется протокол '''Escort BLE'''. | ||
'''Режим Advertising''' - режим передачи данных, в котором устройство “раздает” пакеты данных с определенной частотой вне зависимости от наличия девайса, принимающего данные. | '''Режим Advertising''' - режим передачи данных, в котором устройство “раздает” пакеты данных с определенной частотой вне зависимости от наличия девайса, принимающего данные. | ||
| Строка 29: | Строка 28: | ||
'''[[База BLE-RS485]]''' - устройство, ретранслирующее передачу данных и конвертирующее их из Bluetooth-пакета в пакет данных, передаваемый по интерфейсу RS-485 в соответствии с протоколом LLS. | '''[[База BLE-RS485]]''' - устройство, ретранслирующее передачу данных и конвертирующее их из Bluetooth-пакета в пакет данных, передаваемый по интерфейсу RS-485 в соответствии с протоколом LLS. | ||
'''[[BA-BLE|База BA-BLE]]''' - устройство, ретранслирующее передачу данных и конвертирующее их из Bluetooth-пакета в пакет данных, передаваемый по интерфейсам RS-485 и RS-232 в соответствии с протоколом LLS. | '''[[BA-BLE|База BA-BLE]]''' - устройство, ретранслирующее передачу данных и конвертирующее их из Bluetooth-пакета в пакет данных, передаваемый по интерфейсам RS-485 и RS-232 в соответствии с протоколом LLS или MODBUS. | ||
= '''<big>Конструкция датчика</big>''' = | = '''<big>Конструкция датчика</big>''' = | ||
| Строка 41: | Строка 40: | ||
= '''Подключение датчика к смартфону''' = | = '''Подключение датчика к смартфону''' = | ||
Для настройки | Для настройки DU-BLE датчика вам следует использовать приложение Escort Configurator доступное на [https://apps.apple.com/ru/app/escort-sensor-configurator/id1483425085 iOS] и [https://play.google.com/store/apps/details?id=ru.fmeter.config Android] устройствах (далее “'''приложение'''”). | ||
== '''<big>Геолокация</big>''' == | == '''<big>Геолокация</big>''' == | ||
| Строка 51: | Строка 50: | ||
[[Файл:Подключение DU-BLE.gif]] | [[Файл:Подключение DU-BLE.gif]] | ||
Нажмите кнопку '''Настройка датчиков'''. Далее, выберите ''' | Нажмите кнопку '''Настройка датчиков'''. Далее, выберите '''DU-BLE'''. | ||
[[Файл:Android_app_main_screen_sensors.png|безрамки|810x810пкс]] [[Файл:Android выбор подключения DU-BLE.png|810x810пкс]] | [[Файл:Android_app_main_screen_sensors.png|безрамки|810x810пкс]] [[Файл:Android выбор подключения DU-BLE.png|810x810пкс]] | ||
| Строка 59: | Строка 58: | ||
Или выберите требуемый датчик из списка и нажмите кнопку '''Подключиться'''. В устройстве '''Android''' вы можете нажать рядом с именем датчика для отображения пакета данных полученных в режиме '''advertising.''' | Или выберите требуемый датчик из списка и нажмите кнопку '''Подключиться'''. В устройстве '''Android''' вы можете нажать рядом с именем датчика для отображения пакета данных полученных в режиме '''advertising.''' | ||
[[Файл: | [[Файл:Android подключение к DU-BLE.png|807x807пкс]] [[Файл:Advertising DU-BLE.png|806x806пкс]] | ||
== '''<big>Установка пароля</big>''' == | == '''<big>Установка пароля</big>''' == | ||
| Строка 66: | Строка 65: | ||
Задать, изменить и удалить пароль можно в меню '''Доп. возможности'''. | Задать, изменить и удалить пароль можно в меню '''Доп. возможности'''. | ||
[[Файл: | [[Файл:Переход в доп возможности DU-BLE.png|557x557пкс]] | ||
Затем по появившейся вкладке в графе по работе с паролем введите пароль, который будет использоваться впоследствии, и нажмите на кнопку '''Установить'''. | Затем по появившейся вкладке в графе по работе с паролем введите пароль, который будет использоваться впоследствии, и нажмите на кнопку '''Установить'''. | ||
[[Файл: | [[Файл:Установка пароля BA-BLE.png|816x816пкс]]<blockquote>'''<big><u>ОБРАТИТЕ ВНИМАНИЕ, ЧТО ПРОЦЕДУРА СБРОСА ПАРОЛЯ ЯВЛЯЕТСЯ ВЕСЬМА ТРУДОЕМКОЙ МЫ РЕКОМЕНДУЕМ ОТВЕТСТВЕННО ОТНЕСТИСЬ К ЗАДАНИЮ ПАРОЛЯ И ЕГО СОХРАННОСТИ.</u></big>'''</blockquote>'''<big>Так же обратите внимание что пароль не может начинаться с 0.</big>''' | ||
Для удаления ранее заданного пароля необходимо ввести его в поле Пароль, а затем последовательно нажать кнопки '''Ввести''' и '''Удалить'''. | Для удаления ранее заданного пароля необходимо ввести его в поле Пароль, а затем последовательно нажать кнопки '''Ввести''' и '''Удалить'''. | ||
'''Внимание!''' По умолчанию пароль на датчике не установлен! Если вы подключили датчик и на нем уже был задан пароль, свяжитесь с технической поддержкой. | '''Внимание!''' По умолчанию пароль на датчике не установлен! Если вы подключили датчик и на нем уже был задан пароль, свяжитесь с технической поддержкой. | ||
== '''<big>Основные параметры датчика</big>''' == | |||
Для того чтобы увидеть основные параметры датчика, перейдите во вкладку '''Данные'''. Так, вы можете видеть следующие параметры: | |||
# '''RSSI''' - Индикатор силы полученного сигнала, который говорит о том, на сколько хорошо ваш смартфон принимает присылаемые данные этот параметр не передается датчиком, а высчитывается принимаемым устройством | |||
# '''Vbat''' или заряд батареи датчика (3.5В или выше говорит о том, что батарея полностью заряжена; 3.2В или ниже говорит о том, что батарея разряжена и ее следует заменить) | |||
# Серийный номер датчика | |||
# Версию прошивки (далее '''FW'''), установленную в датчик | |||
# '''Режим работы''' установленный на датчике | |||
# '''MAC-адрес датчика''' используется для подключения датчика к совместимым с ним внешним устройствам | |||
# Показания в выбраном режиме работы датчика | |||
# Кнопка установки текущего угла наклона как 0 | |||
[[Файл:Android данные DU-BLE.png|789x789пкс]] | |||
'''Вольтаж батареи на 10-15 секунд падает до 3.2В''' - это нормально (особенно если это происходит после перезагрузки датчика путем извлечения батареи датчика и последующей установки батареи обратно). Это происходит из-за того, что все процессы в датчике (измерение уровня, температуры и напряжения батареи, а также отправка пакета данных) запускаются одновременно, потребление энергии возрастает, что приводит к временному снижению напряжения батареи. | |||
= '''<big>Режимы работы</big>''' = | |||
Для установки режима работы на датчике, перейдите в меню настройки. | |||
[[Файл:Переход в настройки DU-BLE.png|599x599пкс]] | |||
{| class="wikitable" | |||
|'''<big>Наименование режима</big>''' | |||
|'''<big>Описание режима</big>''' | |||
|'''<big>Формат передаваемых данных</big>''' | |||
|- | |||
|'''Транспортировочный''' | |||
|Используется для транспортировки и хранения датчика. Акселерометр выключен для экономии энергии; измерений не проводится. | |||
| | |||
|- | |||
|'''Контроль Вертикального вращения''' | |||
| rowspan="2" |Применяется для определения направления вращения датчика в плоскости параллельной плоскости установки датчика (кроме вращения, параллельному плоскости земли) и/или подсчета оборотов и скорости (об/мин). | |||
'''Горизонтальное вращение''' - датчик устанавливается вдоль оси вращения бетономешалки выпуклой часть корпуса под 90° относительно земли. | |||
'''Вертикальное вращение''' - датчик устанавливается перпендикулярно оси вращения бетономешалки. | |||
| rowspan="2" | | |||
'''1. Только направление''' | |||
0 - нет вращения | |||
1 - вращение влево | |||
2 - вращение вправо | |||
(эти значения вы можете задать самостоятельно) | |||
'''2. Кол-во оборотов и скорость вращения (об/мин), направление показано + или -''' | |||
|- | |||
|'''Контроль горизонтального вращения''' | |||
|- | |||
|'''Контейнер''' | |||
|Служит для контроля загрузки техники, например, мусороуборочная машина | |||
|Передается угол наклона и накопительный счетчик контейнеров | |||
|- | |||
|'''Ковш''' | |||
|Служит для определения работы или простоя экскаватора и подобной техники. | |||
|Передается угол наклона и сработка в зависимости от того работает техника или простаивает | |||
|- | |||
|'''Отвал''' | |||
|Служит для определения работы отвала снегоуборочных машин и подобной техники. | |||
|Передается угол наклона и сработка в зависимости от того, работает техника или простаивает | |||
|- | |||
|'''Контроль угла''' | |||
|Служит для определения угла наклона частей механизмов относительно горизонта. События сработки происходят при достижении некоторого угла, установленного пользователем. | |||
|Передается угол наклона и сработка в зависимости от того, опущен или поднят контрольный элемент техники, соответственно | |||
|- | |||
|'''Горизонтальный инклинометр''' | |||
|В режиме “'''Одноосевого”''' измерения, датчик фиксирует отклонения только по одной оси - оси тангажа - от нулевой точки, которую нужно задать после выбора режима и установки датчика в момент, когда механизм находится на ровной поверхности в походном положении. Угол измеряется от 0 до 360 градусов. | |||
В режиме '''“Двухосевой”''' вы сможете отслеживать угол наклона по каждой оси измерения отдельно. | |||
|Передается угол(-ы) крена (и тангажа). | |||
'''0-360''' для одной оси | |||
'''0-180''' для другой оси | |||
|- | |||
|'''Вертикальный инклинометр''' | |||
|В режиме “'''Одноосевого”''' измерения, датчик фиксирует отклонения только по одной оси - оси тангажа - от нулевой точки, которую нужно задать после выбора режима и установки датчика в момент, когда механизм находится на ровной поверхности в походном положении. Угол измеряется от 0 до 360 градусов. | |||
В режиме '''“Двухосевой”''' вы сможете отслеживать угол наклона по каждой оси измерения отдельно. | |||
|Передается угол(-ы) крена (и тангажа). | |||
'''0-360''' для одной оси | |||
'''0-180''' для другой оси | |||
|} | |||
== '''<big>Контроль Вертикального вращения</big>''' == | |||
[[Файл:Контроль вертикального вращения.png|710x710пкс]][[Файл:Контроль вертикального вращения настройки.png|710x710пкс]] | |||
# Выбор формата передаваемых данных ('''Только направление или Скорость и об/мин)''' | |||
# Выбор передаваемых значений вращение влево и вправо, '''доступно только''' '''в формате передачи "только направление"''' | |||
Датчик устанавливается с торца бочки. | |||
Данный режим имеет '''2 формата передаваемых данных:''' | |||
'''1) Только направление -''' применяется, например, для контроля направления вращения бетоносмесителя. В зависимости от направления вращения вокруг оси передается событие сработки: при вращении вправо будет передаваться значение '''1''', при вращении влево - значение '''2''', при отсутсвии вращения будет передаваться 0. | |||
Значение вращения влево и вправо вы можете изменить (от 1…255) | |||
'''2) Скорость и об/сек.''' Датчик будет передавать число совершенных оборотов и скорость вращения в об/мин. Скорость вращения будет рассчитана датчиком после первых трех полных оборотов. В одну сторону скорость будет положительной, в другую отрицательной. Подробнее ознакомиться о том, как настроить распознавание скорости на платформе мониторинга, вы можете [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing в данной инструкции] | |||
[[Файл:Место установки в режиме вертикального вращения.png|660x660пкс]][[Файл:Пример места установки в режиме вертикального вращения.png|668x668пкс]] | |||
== '''<big>Контроль Горизонтального вращения</big>''' == | |||
[[Файл:Контроль горизонтального вращения.png|686x686пкс]][[Файл:Настройки горизонтального вращения.png|686x686пкс]] | |||
# Выбор формата передаваемых данных ('''Только направление или Скорость и об/мин)''' | |||
# Выбор передаваемых значений вращение влево и вправо, '''доступно только''' '''в формате передачи "только направление"''' | |||
Датчик устанавливается на боковой поверхности бочки.<blockquote><big>'''В горизонтального вращения датчик устанавливается выпуклой/полукруглой частью вверх или вниз!'''</big> '''<big>При установке выпуклой/полукруглой частью в лево или право подсчет вращений производится не будет!</big>'''</blockquote>Данный режим имеет '''2 формата передаваемых данных:''' | |||
'''1) Только направление -''' применяется, например, для контроля направления вращения бетоносмесителя. В зависимости от направления вращения вокруг оси передается событие сработки: при вращении вправо будет передаваться значение '''1''', при вращении влево - значение '''2''', при отсутствии вращения будет передаваться 0. | |||
Значение вращения влево и вправо вы можете изменить (от 1…255) | |||
'''2) Скорость и об/сек.''' Датчик будет передавать число совершенных оборотов и скорость вращения в об/мин. Скорость вращения будет рассчитана датчиком после первых трех полных оборотов. В одну сторону скорость будет положительной, в другую отрицательной. Подробнее ознакомиться о том, как настроить распознавание скорости на платформе мониторинга, вы можете [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing в данной инструкции] | |||
[[Файл:DU-BLE горизонтальный режим ориентация оси датчика.png|868x868пкс]] | |||
[[Файл:Пример места установки в режиме горизонтального вращения.png|697x697пкс]] | |||
== '''<big>Контейнер</big>''' == | |||
[[Файл:Контейнер.png|600x600пкс]][[Файл:Контейнер настройки.png|600x600пкс]] | |||
Служит для контроля выгрузки и загрузки на типах техники, как мусороуборочная машина, самосвал и тд., а также для более точного контроля открывания крышки люка. | |||
После установки датчика следует произвести установку нуля. Техника при этом должна быть расположена на ровной площадке. При пересечении нижнего и верхнего порогового значения количество сработок увеличиться и параметре сработки будет передаваться общий счетчик сработок. | |||
[[Файл:Мусоровоз.png|874x874пкс]] | |||
При пересечении синей линии (Верхнее пороговое значение) счетчик увеличивается на 1, для повторной сработки необходимо пересечь зеленую линию (Нижнее пороговое значение) | |||
Черная линия - Ноль | |||
Зеленая линия - Нижнее пороговое значение | |||
Синяя линия - Верхнее пороговое значение | |||
Счетчик с каждым контейнером продолжит увеличиваться до максимального значения 65535. После чего он обнулится и снова продолжит расти. При 100 контейнерах в день, счетчика хватит на 1-2 года. | |||
Настройка принимаемых показаний на платформе показана [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing в этой инструкции] | |||
== '''<big>Ковш</big>''' == | |||
[[Файл:Ковш,.png|802x802пкс]][[Файл:Ковш.png|802x802пкс]] | |||
Данный режим предназначен для использования на экскаваторах для контроля времени работы или простоя ковша. | |||
'''Уровень сглаживания''' - как сильно будут фильтроваться данные угла наклона при резких изменениях. | |||
'''Дельта''' - минимальное значение угла, при котором происходит срабатывание. | |||
'''Задержки на выключение''' - промежуток времени в течении которого будет передаваться работа. | |||
'''Интервал измерения''' - промежуток времени, через который происходит сравнение угла наклона для вычисления дельты. | |||
'''Передавать в качестве сработки''' - значение которое будет передаваться как работа. | |||
«'''Интервал измерения'''» задает время, в течении которого датчик замеряет значения угла. По истечении интервала измерения текущее значение сравнивается с предыдущим значением. Если разница составит некоторый угол, который больше или равен значению «'''Дельта'''», то произойдет срабатывание, что будет сигнализировать о работе ковша экскаватора. Параметр «'''Дельта'''» задает минимальное значение угла, при котором происходит срабатывание. Если работа ковшом остановлена, то разница углов не превысит заданное значение «'''Дельта'''», запускается «'''задержка на выключение'''», срабатывания не происходит (передается значение «'''0'''»). Таким образом разделяется время работы и простоя ковша, исключая ложное срабатывание. | |||
Настройка принимаемых показаний на платформе показана [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing в этой инструкции]<blockquote>'''<big>При установке датчиков угла наклона на манипуляторах экскаваторов рекомендуется размещать датчик на колене манипулятора, которое в момент выполнения работ экскаватором является наиболее активным и совершает большее количество движений большей амплитуды изменения угла.</big>'''</blockquote>[[Файл:DU-BLE экскаватор.png|604x604px]][[Файл:Экскаватор пример.png|749x749пкс]] | |||
== '''<big>Отвал</big>''' == | |||
[[Файл:Отвал.png|742x742пкс]][[Файл:Отвал настройки.png|742x742пкс]] | |||
Режим предназначен для установки на устройства типа «отвал», например, снегоуборочных машин, используемых для расчистки дорог, или бульдозера. | |||
'''Уровень сглаживания''' - как сильно будут фильтроваться данные угла наклона при резких изменениях. | |||
'''Верхнее пороговое значение''' - пороговое значение угла наклона выше которого сработка прекращается. | |||
'''Нижнее пороговое значение''' - пороговое значение угла наклона ниже которого происходит сработка после задержки на включение. | |||
'''Задержка вкл.''' - количество секунд нахождения датчика ниже нижнего порогового значения для начала сработки. | |||
'''Задержка выкл.''' - количество секунд нахождения датчика между верхним и нижним углом для окончания сработки. | |||
'''Передавать в качестве сработки''' - значение которое будет передаваться как работа.<blockquote>'''<big>Важно! Не рекомендуется использовать датчик для контроля механизмов, амплитуда отклонения которых менее 10 градусов. Например, средний отвал грейдера.</big>'''</blockquote>При пересечении границы '''«НИЗ»''' в сторону меньшего угла запускается таймер задержки на включение. Если по истечению таймера задержки включения текущий угол не будет превышать границу '''«НИЗ»''', то произойдет событие сработки (передается значение '''«1»''', либо другое значение, которое Вы установите). | |||
При пересечении границы '''«НИЗ»''' в сторону большего угла запускается таймер задержки на выключение. Если по истечению таймера задержки выключения текущий угол останется больше границы '''«НИЗ»''', то сработка сбросится (передается значение '''«0»'''). | |||
Если же в момент отсчета таймера задержки выключения датчик пересекает обратно границу '''«НИЗ»''', в сторону меньшего угла, запущенный таймер выключения сбрасывается. | |||
При пересечении '''«ВЕРХ»''' в сторону большего угла сработка сбросится мгновенно. | |||
Это сделано для получения более наглядных отсчетов по срабатыванию датчика (исключаются кратковременные поднятия и опускания орудия во время объезда препятствий и разворотов).<blockquote><big>'''Значение «0» устанавливается в положении работы'''</big></blockquote>[[Файл:Бульдозер.png|804x804пкс]] | |||
[[Файл:Отвал схема установки.png]] | |||
Настройка принимаемых показаний на платформе показана [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing в этой инструкции] | |||
== '''<big>Контроль угла</big>''' == | |||
[[Файл:Контроль угла.png|822x822пкс]][[Файл:Контроль угла настройки.png|822x822пкс]] | |||
Режим работы «Контроль угла» может быть применен, например, для контроля работы механизма мусороуборочной машины, самосвала и других рабочих агрегатов спец. техники.<blockquote>Трехосевой акселерометр в датчике не может не реагировать на вибрации, ускорения, торможения и особенности рельефа. | |||
'''Поэтому датчик не совсем подходит для контроля работы механизмов техники, выполняющей такие работы как, например, отсыпка дороги,''' т.к. при таких работах выгрузка идет при поднятом под малым углом кузове и в движении техники, что исключает возможность надежной валидации показаний датчика по скорости.</blockquote>В остальных случаях показания датчика можно валидировать по скорости. | |||
Подробнее об этом пункт [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing "Валидация по скорости", стр. 19] | |||
В датчике также имеется алгоритм фильтрации, однако при включенной фильтрации замедляется измерение угла, что может привести к пропускам фактических сработок. | |||
Еще один вариант - установить второй датчик на раму ТС и настроить дифференциальный режим. [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing Подробнее в мануале] | |||
'''Уровень сглаживания''' - как сильно будут фильтроваться данные угла наклона при резких изменениях. | |||
'''Верхнее пороговое значение''' - пороговое значение угла наклона выше которого происходит сработка. | |||
'''Нижнее пороговое значение''' - пороговое значение угла наклона ниже которого прекращается сработка. | |||
'''Передавать в качестве сработки''' - значение которое будет передаваться как работа. | |||
При увеличении угла и достижении верхней границы происходит срабатывание датчика, при обратном движении и пересечении нижней границы срабатывание сбрасывается (передается значение «0»). | |||
[[Файл:Кран.png|619x619пкс]] | |||
Настройка принимаемых показаний на платформе показана [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing в этой инструкции] | |||
== '''<big>Горизонтальный инклинометр</big>''' == | |||
[[Файл:Горизонтальный инклинометр .png|869x869пкс]][[Файл:Горизонтальный инклинометр настройки.png|869x869пкс]] | |||
Режим инклинометр предназначен для измерения угла и направления наклона. | |||
'''Уровень сглаживания''' - как сильно будут фильтроваться данные угла наклона при резких изменениях. | |||
'''Одноосевой режим''': измеряется угол поворота по оси X (крен) в горизонтальном положении, т.е. плоскость ZY перпендикулярна плоскости установки. Есть возможность установки нуля. Диапазон измерений 360°. События сработки нет. | |||
'''Двухосевой режим''': измеряется угол поворота по оси Y (крен) и угол поворота по оси X (тангаж) в горизонтальном положении. Есть возможность установки нуля. Диапазон измерений 180°. События сработки нет.<blockquote><big>'''Передача информации в режиме "Горизонтальный инклинометр" поддерживается только при использовании [[BA-BLE]]'''</big></blockquote>[[Файл:Горизонтальный инклинометр.png]] | |||
== '''<big>Вертикальный инклинометр</big>''' == | |||
[[Файл:Вертикальный инклинометр .png|776x776пкс]][[Файл:Вертикальный инклинометр настройки.png|776x776пкс]] | |||
Режим инклинометр предназначен для измерения угла и направления наклона. | |||
'''Уровень сглаживания''' - как сильно будут фильтроваться данные угла наклона при резких изменениях. | |||
'''Одноосевой режим''': измеряется угол поворота по оси Z (крен) в вертикальном положении, т.е. плоскость XY параллельна плоскости установки. Есть возможность установки нуля. Диапазон измерений 360°. События сработки нет. | |||
'''Двухосевой режим''': измеряется угол поворота по оси Y (крен) и угол поворота по оси Z (тангаж) в вертикальном положении. Есть возможность установки нуля. Диапазон измерений 180°. События сработки нет.<blockquote><big>'''Передача информации в режиме "Вертикальный инклинометр" поддерживается только при использовании [[BA-BLE]]'''</big></blockquote>[[Файл:Вертикальный инклинометр.png]] | |||
= <big>'''Пломбировка и крепление'''</big> = | |||
== '''<big>Присоединительные размеры</big>''' == | |||
=== '''<big>Присоединительные размеры старого образца</big>''' === | |||
[[Файл:Присоединительные размеры DU-BLE старого образца.png]] | |||
[[Файл:Габариты старого DU-BLE.png]] | |||
=== '''<big>Присоединительные размеры нового образца</big>''' === | |||
[[Файл:Присоединительные размеры DU-BLE нового образца.png]] | |||
[[Файл:Габариты нового DU-BLE.png]] | |||
== <big>'''Пломбирование датчика'''</big> == | |||
=== <big>'''Пломбирование прежнего образца'''</big> === | |||
Для того, чтобы опломбировать датчик и предотвратить несанкционированный доступ к нему, установите защитную крышку и проденьте пломбу в специальные отверстия в крышке. Затяните пломбу, против ее конец в специальное отверстие в пломбе. Отрежьте излишки провода пломбы. | |||
[[Файл:Пломбировка DU-BLE.png]] | |||
=== <big>'''Пломбирование актуального образца'''</big> === | |||
Понадобятся защитная крышка датчика и пломба из комплекта<gallery widths="300" heights="300"> | |||
Файл:Защитная_крышка_TD-BLE.png|'''<big>Защитная крышка</big>''' | |||
Файл:Пломба_TD-BLE.png|'''<big>Пломба</big>''' | |||
</gallery>Крышка крепится на голову датчика | |||
[[Файл:TD-BLE_с_защитной_крышкой.png|491x491пкс]] | |||
Затем в специальном отверстии фиксируется сама пломба (ее необходимо вставить до конца, '''закрытым окончанием наружу''')<gallery widths="350" heights="350"> | |||
Файл:Установка_пломбы_на_датчик_TD-BLE.png|'''<big>Установка пломбы на датчик</big>''' | |||
Файл:Установленная_пломба_на_датчик_TD-BLE.png|'''<big>Установленная пломба на датчик</big>''' | |||
</gallery>Чтобы удалить пломбу, следует вкрутить в нее специальный ключ из комплекта (также можно использовать любой саморез подходящего размера) и потянуть его на себя. | |||
[[Файл:Извлечение_пломбы.png|без|мини|515x515пкс|'''<big>Извлечение пломбы</big>''']] | |||
[[Файл:Пломба_после_извлечения.png|без|мини|'''<big>Пломба после извлечения</big>''']] | |||
Таким образом, извлечь пломбу будет невозможно, не повредив ее. Это обеспечивает дополнительную защиту от несанкционированного доступа. | |||
=== '''<big>Альтернативная пломбировка актуального образца</big>''' === | |||
Так же в комплекте с DU-BLE актуального образца имеется альтернативная пломба, если необходима номерная пломба. | |||
* Необходимо продеть тросс через отверстие в крышке датчика | |||
[[Файл:Альтернативная_пломбировка_шаг_1.png|425x425пкс]] | |||
* Продеть оба конца тросса через отверстие в глове датчика | |||
[[Файл:Альтернативная_пломбировка_шаг_2.png|643x643пкс]] | |||
* Продеть оба конца через пломбу, затянуть тросс и установить пломбу нажав на выпирающую часть | |||
[[Файл:Альтернативная_пломбировка_шаг_3.png|714x714пкс]] | |||
== <big>'''Крепление и направление передатчика'''</big> == | |||
Наиболее распространённым способом крепления является установка на саморезы с уплотнительной шайбой. Также возможна установка на резьбовые обжимные гайки, приварные втулки и прочие конструктивные элементы. Датчик может устанавливаться на заранее подготовленные места с помощью винтов и болтов классами прочности не менее 4.8. При этом необходимо обеспечить герметичность соединения корпуса датчика и ёмкости. Для дополнительной защиты разрешается использовать автомобильный маслобензостойкий герметик. | |||
Для пластиковых баков могут быть использованы заклепки и болты. | |||
Датчик следует устанавливать так, чтобы его передатчик был направлен в сторону приемника. Расположение передатчика на разных моделях DU-BLE показано ниже. | |||
[[Файл:Направление_антены_датчика_BLE.png]] | |||
== <big>'''Как сильно закручивать саморезы'''</big> == | |||
[[Файл:Как_сильно_закручивать_саморезы.png|без|мини|800x800пкс|'''<big>Как сильно закручивать саморезы</big>''']] | |||
= '''<big>Обновление прошивки (FW)</big>''' = | |||
[[Файл:Обновление DU-BLE.gif]] | |||
Для обновления прошивки на DU-BLE: | |||
* Скачайте актуальную версию прошивки как файл в память телефона Актуальную прошивку вы можете найти [https://www.fmeter.ru/download/?product=DUBLE#escort-duble в разделе загрузки.] | |||
* Подключитесь к датчику | |||
* Перейдите в "'''Доп. возможности'''" | |||
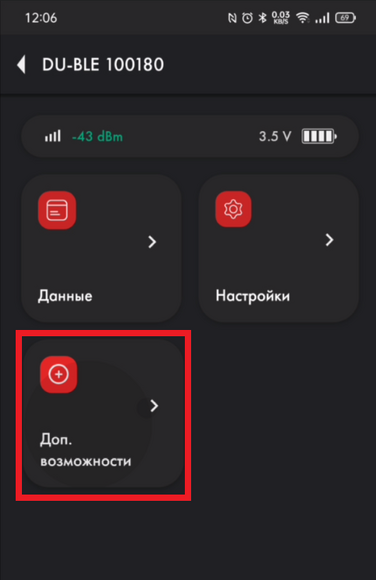
* [[Файл:Переход в доп. возможности DU-BLE.png|580x580пкс]] | |||
* Перейдите в режим обновления | |||
* [[Файл:Переход_в_режим_обновления_BA-BLE.png|630x630пкс]] | |||
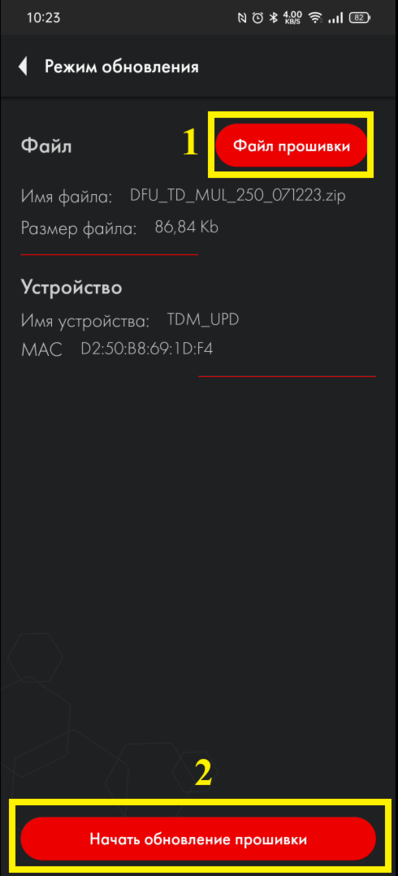
* Выберите файл прошивки('''1''') из памяти телефона (Файлом прошивки является сам .zip архив, разархивировать не нужно) и начните процесс прошивки ('''2'''). '''<big>Эти действия необходимо произвести в течении 30 секунд после перехода в режим обновления!</big>''' | |||
* [[Файл:Начало_прошивки_TD-BLE.png|876x876пкс]] | |||
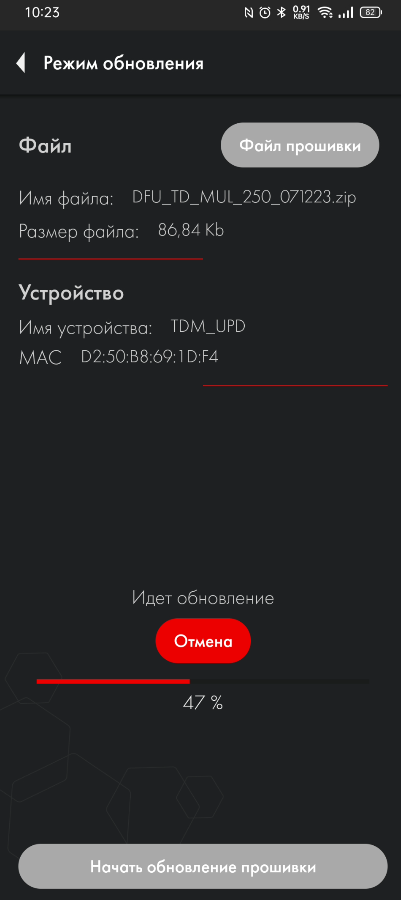
* Процесс прошивки должен начаться. '''<big>В процессе прошивки нельзя закрывать или сворачивать приложение!</big>''' | |||
* [[Файл:Процесс_прошивки_TD-BLE.png]] | |||
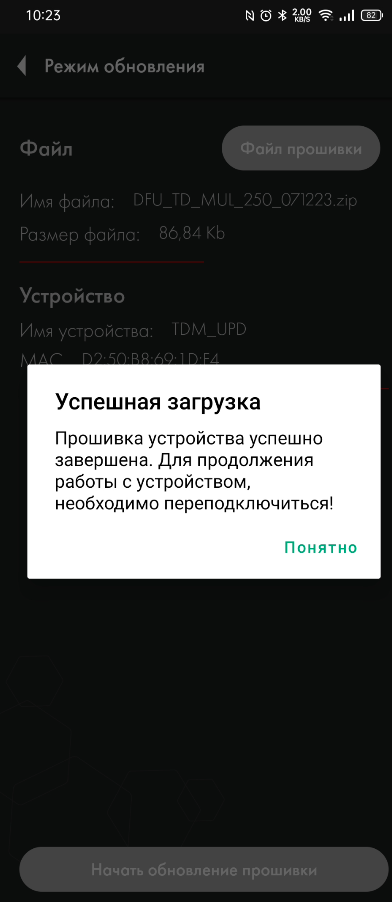
* По окончанию прошивки выйдет окно об удачном обновлении | |||
* [[Файл:Обновление_TD-BLE_завершено_.png]] | |||
Актуальные прошивки вы можете найти [https://www.fmeter.ru/download/?product=DUBLE#escort-duble в разделе загрузки.] | |||
Файлом прошивки является сам .zip архив, разархивировать не нужно. | |||
= '''<big>Полезные ссылки</big>''' = | |||
* '''<big>[https://www.fmeter.ru/download/_ftp/datchik-ugla-naklona/eskort-du-ble/%D0%9F%D0%B0%D1%81%D0%BF%D0%BE%D1%80%D1%82%20Escort%20DU-BLE.pdf?v=040824234407 Технический паспорт устройства]</big>''' | |||
* '''<big>[https://www.fmeter.ru/produktsiya/besprovodnoy-datchik-ugla-naklona/eskort-du-ble/#active Страница продукта]</big>''' | |||
* '''<big>[https://www.fmeter.ru/download/?product=DUBLE#escort-duble Материалы загрузки]</big>''' | |||
* '''<big>[[Таблица совместимости BLE датчиков с трекерами и другими устройствами#DU-BLE|Таблица совместимости BLE датчиков с трекерами и другими устройствами]]</big>''' | |||
* [https://docs.google.com/document/d/1je2NVdSu8GpDtkv8Nfals7hhnMmQw--OHTbuwAs6sCg/edit?usp=sharing '''<big>Настройка принимаемых показаний на платформе</big>'''] | |||
Текущая версия от 11:14, 6 мая 2026
Определение и назначение датчика

Беспроводной датчик угла с автономным питанием DU-BLE торговой марки ЭСКОРТ (в дальнейшем – измеритель, изделие, датчик угла, DU-BLE) предназначен для измерения углового положения отклоняемых частей различных машин и механизмов относительно гравитационного поля Земли, определения направления вращения (в соответствующих режимах) и передачи этих данных по радиоканалу на частоте 2.4 ГГц.
Измеритель (датчик) «DU-BLE» применяется в автотракторной технике и на других объектах, где требуется измерение угла.
DU-BLE представляет собой полностью беспроводной датчик с автономным питанием. Данные датчика передаются в виде Bluetooth-пакетов в режиме Advertising; частота отправки данных - каждые 3 секунды.
Более подробные технические характеристики представлены в тех.паспорте устройства.
Основные термины и понятия
Серийный номер - код, состоящий из ряда букв или цифр, присваиваемый продукту (датчику).
Имя датчика - обозначение датчика среди BLE устройств, состоящее из первых двух букв модели датчика и 6 последних значений серийного номера; например, DU_100100;
MAC-адрес - уникальный идентификатор, присваиваемый каждой единице активного оборудования. Используется для распознавания устройств в сети.
Пакет данных - совокупность значений, передаваемых устройством, оснащенным Bluetooth передатчиком, структура которого задается протоколом передачи данных.
Протокол передачи данных - набор определённых правил или соглашений интерфейса логического уровня, который определяет обмен данными между различными программами или устройствами. В случае датчика DU-BLE для передачи пакетов данных используется протокол Escort BLE.
Режим Advertising - режим передачи данных, в котором устройство “раздает” пакеты данных с определенной частотой вне зависимости от наличия девайса, принимающего данные.
Режим Connection - режим передачи данных, в котором передатчик ждет подключения к принимающему устройству для того, чтобы начать передачу пакетов данных.
База BLE-RS485 - устройство, ретранслирующее передачу данных и конвертирующее их из Bluetooth-пакета в пакет данных, передаваемый по интерфейсу RS-485 в соответствии с протоколом LLS.
База BA-BLE - устройство, ретранслирующее передачу данных и конвертирующее их из Bluetooth-пакета в пакет данных, передаваемый по интерфейсам RS-485 и RS-232 в соответствии с протоколом LLS или MODBUS.
Конструкция датчика
Конструкция DU-BLE первого поколения

Конструкция DU-BLE второго поколения

Подключение датчика к смартфону
Для настройки DU-BLE датчика вам следует использовать приложение Escort Configurator доступное на iOS и Android устройствах (далее “приложение”).
Геолокация
Запустите конфигуратор. Включите bluetooth, геолокацию и так же убедитесь, что у приложения есть доступ к Геолокации.


Подключение датчика

Нажмите кнопку Настройка датчиков. Далее, выберите DU-BLE.


Найдите требуемый датчик введя последние 6 цифр его серийного номера. Вы можете найти серийный номер на голове датчика.
Или выберите требуемый датчик из списка и нажмите кнопку Подключиться. В устройстве Android вы можете нажать рядом с именем датчика для отображения пакета данных полученных в режиме advertising.


Установка пароля
Настоятельно рекомендуем установить на датчике пароль, для того чтобы ограничить доступ к изменениям его настроек. При первом подключении приложение запросит задать пароль автоматически.
Задать, изменить и удалить пароль можно в меню Доп. возможности.

Затем по появившейся вкладке в графе по работе с паролем введите пароль, который будет использоваться впоследствии, и нажмите на кнопку Установить.

ОБРАТИТЕ ВНИМАНИЕ, ЧТО ПРОЦЕДУРА СБРОСА ПАРОЛЯ ЯВЛЯЕТСЯ ВЕСЬМА ТРУДОЕМКОЙ МЫ РЕКОМЕНДУЕМ ОТВЕТСТВЕННО ОТНЕСТИСЬ К ЗАДАНИЮ ПАРОЛЯ И ЕГО СОХРАННОСТИ.
Так же обратите внимание что пароль не может начинаться с 0.
Для удаления ранее заданного пароля необходимо ввести его в поле Пароль, а затем последовательно нажать кнопки Ввести и Удалить.
Внимание! По умолчанию пароль на датчике не установлен! Если вы подключили датчик и на нем уже был задан пароль, свяжитесь с технической поддержкой.
Основные параметры датчика
Для того чтобы увидеть основные параметры датчика, перейдите во вкладку Данные. Так, вы можете видеть следующие параметры:
- RSSI - Индикатор силы полученного сигнала, который говорит о том, на сколько хорошо ваш смартфон принимает присылаемые данные этот параметр не передается датчиком, а высчитывается принимаемым устройством
- Vbat или заряд батареи датчика (3.5В или выше говорит о том, что батарея полностью заряжена; 3.2В или ниже говорит о том, что батарея разряжена и ее следует заменить)
- Серийный номер датчика
- Версию прошивки (далее FW), установленную в датчик
- Режим работы установленный на датчике
- MAC-адрес датчика используется для подключения датчика к совместимым с ним внешним устройствам
- Показания в выбраном режиме работы датчика
- Кнопка установки текущего угла наклона как 0

Вольтаж батареи на 10-15 секунд падает до 3.2В - это нормально (особенно если это происходит после перезагрузки датчика путем извлечения батареи датчика и последующей установки батареи обратно). Это происходит из-за того, что все процессы в датчике (измерение уровня, температуры и напряжения батареи, а также отправка пакета данных) запускаются одновременно, потребление энергии возрастает, что приводит к временному снижению напряжения батареи.
Режимы работы
Для установки режима работы на датчике, перейдите в меню настройки.

| Наименование режима | Описание режима | Формат передаваемых данных |
| Транспортировочный | Используется для транспортировки и хранения датчика. Акселерометр выключен для экономии энергии; измерений не проводится. | |
| Контроль Вертикального вращения | Применяется для определения направления вращения датчика в плоскости параллельной плоскости установки датчика (кроме вращения, параллельному плоскости земли) и/или подсчета оборотов и скорости (об/мин).
Горизонтальное вращение - датчик устанавливается вдоль оси вращения бетономешалки выпуклой часть корпуса под 90° относительно земли. Вертикальное вращение - датчик устанавливается перпендикулярно оси вращения бетономешалки. |
0 - нет вращения 1 - вращение влево 2 - вращение вправо (эти значения вы можете задать самостоятельно) 2. Кол-во оборотов и скорость вращения (об/мин), направление показано + или - |
| Контроль горизонтального вращения | ||
| Контейнер | Служит для контроля загрузки техники, например, мусороуборочная машина | Передается угол наклона и накопительный счетчик контейнеров |
| Ковш | Служит для определения работы или простоя экскаватора и подобной техники. | Передается угол наклона и сработка в зависимости от того работает техника или простаивает |
| Отвал | Служит для определения работы отвала снегоуборочных машин и подобной техники. | Передается угол наклона и сработка в зависимости от того, работает техника или простаивает |
| Контроль угла | Служит для определения угла наклона частей механизмов относительно горизонта. События сработки происходят при достижении некоторого угла, установленного пользователем. | Передается угол наклона и сработка в зависимости от того, опущен или поднят контрольный элемент техники, соответственно |
| Горизонтальный инклинометр | В режиме “Одноосевого” измерения, датчик фиксирует отклонения только по одной оси - оси тангажа - от нулевой точки, которую нужно задать после выбора режима и установки датчика в момент, когда механизм находится на ровной поверхности в походном положении. Угол измеряется от 0 до 360 градусов.
В режиме “Двухосевой” вы сможете отслеживать угол наклона по каждой оси измерения отдельно. |
Передается угол(-ы) крена (и тангажа).
0-360 для одной оси 0-180 для другой оси |
| Вертикальный инклинометр | В режиме “Одноосевого” измерения, датчик фиксирует отклонения только по одной оси - оси тангажа - от нулевой точки, которую нужно задать после выбора режима и установки датчика в момент, когда механизм находится на ровной поверхности в походном положении. Угол измеряется от 0 до 360 градусов.
В режиме “Двухосевой” вы сможете отслеживать угол наклона по каждой оси измерения отдельно. |
Передается угол(-ы) крена (и тангажа).
0-360 для одной оси 0-180 для другой оси |
Контроль Вертикального вращения


- Выбор формата передаваемых данных (Только направление или Скорость и об/мин)
- Выбор передаваемых значений вращение влево и вправо, доступно только в формате передачи "только направление"
Датчик устанавливается с торца бочки.
Данный режим имеет 2 формата передаваемых данных:
1) Только направление - применяется, например, для контроля направления вращения бетоносмесителя. В зависимости от направления вращения вокруг оси передается событие сработки: при вращении вправо будет передаваться значение 1, при вращении влево - значение 2, при отсутсвии вращения будет передаваться 0.
Значение вращения влево и вправо вы можете изменить (от 1…255)
2) Скорость и об/сек. Датчик будет передавать число совершенных оборотов и скорость вращения в об/мин. Скорость вращения будет рассчитана датчиком после первых трех полных оборотов. В одну сторону скорость будет положительной, в другую отрицательной. Подробнее ознакомиться о том, как настроить распознавание скорости на платформе мониторинга, вы можете в данной инструкции


Контроль Горизонтального вращения


- Выбор формата передаваемых данных (Только направление или Скорость и об/мин)
- Выбор передаваемых значений вращение влево и вправо, доступно только в формате передачи "только направление"
Датчик устанавливается на боковой поверхности бочки.
В горизонтального вращения датчик устанавливается выпуклой/полукруглой частью вверх или вниз! При установке выпуклой/полукруглой частью в лево или право подсчет вращений производится не будет!
Данный режим имеет 2 формата передаваемых данных:
1) Только направление - применяется, например, для контроля направления вращения бетоносмесителя. В зависимости от направления вращения вокруг оси передается событие сработки: при вращении вправо будет передаваться значение 1, при вращении влево - значение 2, при отсутствии вращения будет передаваться 0.
Значение вращения влево и вправо вы можете изменить (от 1…255)
2) Скорость и об/сек. Датчик будет передавать число совершенных оборотов и скорость вращения в об/мин. Скорость вращения будет рассчитана датчиком после первых трех полных оборотов. В одну сторону скорость будет положительной, в другую отрицательной. Подробнее ознакомиться о том, как настроить распознавание скорости на платформе мониторинга, вы можете в данной инструкции
Ошибка создания миниатюры: Файл не найден

Контейнер


Служит для контроля выгрузки и загрузки на типах техники, как мусороуборочная машина, самосвал и тд., а также для более точного контроля открывания крышки люка.
После установки датчика следует произвести установку нуля. Техника при этом должна быть расположена на ровной площадке. При пересечении нижнего и верхнего порогового значения количество сработок увеличиться и параметре сработки будет передаваться общий счетчик сработок.

При пересечении синей линии (Верхнее пороговое значение) счетчик увеличивается на 1, для повторной сработки необходимо пересечь зеленую линию (Нижнее пороговое значение)
Черная линия - Ноль
Зеленая линия - Нижнее пороговое значение
Синяя линия - Верхнее пороговое значение
Счетчик с каждым контейнером продолжит увеличиваться до максимального значения 65535. После чего он обнулится и снова продолжит расти. При 100 контейнерах в день, счетчика хватит на 1-2 года.
Настройка принимаемых показаний на платформе показана в этой инструкции
Ковш


Данный режим предназначен для использования на экскаваторах для контроля времени работы или простоя ковша.
Уровень сглаживания - как сильно будут фильтроваться данные угла наклона при резких изменениях.
Дельта - минимальное значение угла, при котором происходит срабатывание.
Задержки на выключение - промежуток времени в течении которого будет передаваться работа.
Интервал измерения - промежуток времени, через который происходит сравнение угла наклона для вычисления дельты.
Передавать в качестве сработки - значение которое будет передаваться как работа.
«Интервал измерения» задает время, в течении которого датчик замеряет значения угла. По истечении интервала измерения текущее значение сравнивается с предыдущим значением. Если разница составит некоторый угол, который больше или равен значению «Дельта», то произойдет срабатывание, что будет сигнализировать о работе ковша экскаватора. Параметр «Дельта» задает минимальное значение угла, при котором происходит срабатывание. Если работа ковшом остановлена, то разница углов не превысит заданное значение «Дельта», запускается «задержка на выключение», срабатывания не происходит (передается значение «0»). Таким образом разделяется время работы и простоя ковша, исключая ложное срабатывание.
Настройка принимаемых показаний на платформе показана в этой инструкции
При установке датчиков угла наклона на манипуляторах экскаваторов рекомендуется размещать датчик на колене манипулятора, которое в момент выполнения работ экскаватором является наиболее активным и совершает большее количество движений большей амплитуды изменения угла.


Отвал


Режим предназначен для установки на устройства типа «отвал», например, снегоуборочных машин, используемых для расчистки дорог, или бульдозера.
Уровень сглаживания - как сильно будут фильтроваться данные угла наклона при резких изменениях.
Верхнее пороговое значение - пороговое значение угла наклона выше которого сработка прекращается.
Нижнее пороговое значение - пороговое значение угла наклона ниже которого происходит сработка после задержки на включение.
Задержка вкл. - количество секунд нахождения датчика ниже нижнего порогового значения для начала сработки.
Задержка выкл. - количество секунд нахождения датчика между верхним и нижним углом для окончания сработки.
Передавать в качестве сработки - значение которое будет передаваться как работа.
Важно! Не рекомендуется использовать датчик для контроля механизмов, амплитуда отклонения которых менее 10 градусов. Например, средний отвал грейдера.
При пересечении границы «НИЗ» в сторону меньшего угла запускается таймер задержки на включение. Если по истечению таймера задержки включения текущий угол не будет превышать границу «НИЗ», то произойдет событие сработки (передается значение «1», либо другое значение, которое Вы установите).
При пересечении границы «НИЗ» в сторону большего угла запускается таймер задержки на выключение. Если по истечению таймера задержки выключения текущий угол останется больше границы «НИЗ», то сработка сбросится (передается значение «0»).
Если же в момент отсчета таймера задержки выключения датчик пересекает обратно границу «НИЗ», в сторону меньшего угла, запущенный таймер выключения сбрасывается.
При пересечении «ВЕРХ» в сторону большего угла сработка сбросится мгновенно.
Это сделано для получения более наглядных отсчетов по срабатыванию датчика (исключаются кратковременные поднятия и опускания орудия во время объезда препятствий и разворотов).
Значение «0» устанавливается в положении работы


Настройка принимаемых показаний на платформе показана в этой инструкции
Контроль угла


Режим работы «Контроль угла» может быть применен, например, для контроля работы механизма мусороуборочной машины, самосвала и других рабочих агрегатов спец. техники.
Трехосевой акселерометр в датчике не может не реагировать на вибрации, ускорения, торможения и особенности рельефа. Поэтому датчик не совсем подходит для контроля работы механизмов техники, выполняющей такие работы как, например, отсыпка дороги, т.к. при таких работах выгрузка идет при поднятом под малым углом кузове и в движении техники, что исключает возможность надежной валидации показаний датчика по скорости.
В остальных случаях показания датчика можно валидировать по скорости.
Подробнее об этом пункт "Валидация по скорости", стр. 19
В датчике также имеется алгоритм фильтрации, однако при включенной фильтрации замедляется измерение угла, что может привести к пропускам фактических сработок.
Еще один вариант - установить второй датчик на раму ТС и настроить дифференциальный режим. Подробнее в мануале
Уровень сглаживания - как сильно будут фильтроваться данные угла наклона при резких изменениях.
Верхнее пороговое значение - пороговое значение угла наклона выше которого происходит сработка.
Нижнее пороговое значение - пороговое значение угла наклона ниже которого прекращается сработка.
Передавать в качестве сработки - значение которое будет передаваться как работа.
При увеличении угла и достижении верхней границы происходит срабатывание датчика, при обратном движении и пересечении нижней границы срабатывание сбрасывается (передается значение «0»).

Настройка принимаемых показаний на платформе показана в этой инструкции
Горизонтальный инклинометр


Режим инклинометр предназначен для измерения угла и направления наклона.
Уровень сглаживания - как сильно будут фильтроваться данные угла наклона при резких изменениях.
Одноосевой режим: измеряется угол поворота по оси X (крен) в горизонтальном положении, т.е. плоскость ZY перпендикулярна плоскости установки. Есть возможность установки нуля. Диапазон измерений 360°. События сработки нет.
Двухосевой режим: измеряется угол поворота по оси Y (крен) и угол поворота по оси X (тангаж) в горизонтальном положении. Есть возможность установки нуля. Диапазон измерений 180°. События сработки нет.
Передача информации в режиме "Горизонтальный инклинометр" поддерживается только при использовании BA-BLE

Вертикальный инклинометр


Режим инклинометр предназначен для измерения угла и направления наклона.
Уровень сглаживания - как сильно будут фильтроваться данные угла наклона при резких изменениях.
Одноосевой режим: измеряется угол поворота по оси Z (крен) в вертикальном положении, т.е. плоскость XY параллельна плоскости установки. Есть возможность установки нуля. Диапазон измерений 360°. События сработки нет.
Двухосевой режим: измеряется угол поворота по оси Y (крен) и угол поворота по оси Z (тангаж) в вертикальном положении. Есть возможность установки нуля. Диапазон измерений 180°. События сработки нет.
Передача информации в режиме "Вертикальный инклинометр" поддерживается только при использовании BA-BLE

Пломбировка и крепление
Присоединительные размеры
Присоединительные размеры старого образца


Присоединительные размеры нового образца


Пломбирование датчика
Пломбирование прежнего образца
Для того, чтобы опломбировать датчик и предотвратить несанкционированный доступ к нему, установите защитную крышку и проденьте пломбу в специальные отверстия в крышке. Затяните пломбу, против ее конец в специальное отверстие в пломбе. Отрежьте излишки провода пломбы.

Пломбирование актуального образца
Понадобятся защитная крышка датчика и пломба из комплекта
-

Защитная крышка
-
Пломба


Крышка крепится на голову датчика

Затем в специальном отверстии фиксируется сама пломба (ее необходимо вставить до конца, закрытым окончанием наружу)
-

Установка пломбы на датчик
-

Установленная пломба на датчик


Чтобы удалить пломбу, следует вкрутить в нее специальный ключ из комплекта (также можно использовать любой саморез подходящего размера) и потянуть его на себя.


Таким образом, извлечь пломбу будет невозможно, не повредив ее. Это обеспечивает дополнительную защиту от несанкционированного доступа.
Альтернативная пломбировка актуального образца
Так же в комплекте с DU-BLE актуального образца имеется альтернативная пломба, если необходима номерная пломба.
- Необходимо продеть тросс через отверстие в крышке датчика

- Продеть оба конца тросса через отверстие в глове датчика

- Продеть оба конца через пломбу, затянуть тросс и установить пломбу нажав на выпирающую часть

Крепление и направление передатчика
Наиболее распространённым способом крепления является установка на саморезы с уплотнительной шайбой. Также возможна установка на резьбовые обжимные гайки, приварные втулки и прочие конструктивные элементы. Датчик может устанавливаться на заранее подготовленные места с помощью винтов и болтов классами прочности не менее 4.8. При этом необходимо обеспечить герметичность соединения корпуса датчика и ёмкости. Для дополнительной защиты разрешается использовать автомобильный маслобензостойкий герметик.
Для пластиковых баков могут быть использованы заклепки и болты.
Датчик следует устанавливать так, чтобы его передатчик был направлен в сторону приемника. Расположение передатчика на разных моделях DU-BLE показано ниже.

Как сильно закручивать саморезы

Обновление прошивки (FW)

Для обновления прошивки на DU-BLE:
- Скачайте актуальную версию прошивки как файл в память телефона Актуальную прошивку вы можете найти в разделе загрузки.
- Подключитесь к датчику
- Перейдите в "Доп. возможности"
- Перейдите в режим обновления

- Выберите файл прошивки(1) из памяти телефона (Файлом прошивки является сам .zip архив, разархивировать не нужно) и начните процесс прошивки (2). Эти действия необходимо произвести в течении 30 секунд после перехода в режим обновления!
- Процесс прошивки должен начаться. В процессе прошивки нельзя закрывать или сворачивать приложение!
- По окончанию прошивки выйдет окно об удачном обновлении





{kind=link}
Актуальные прошивки вы можете найти в разделе загрузки.
Файлом прошивки является сам .zip архив, разархивировать не нужно.